Benchmark for 6D Object Pose Estimation (BOP)
Sampling objects, cameras and lights

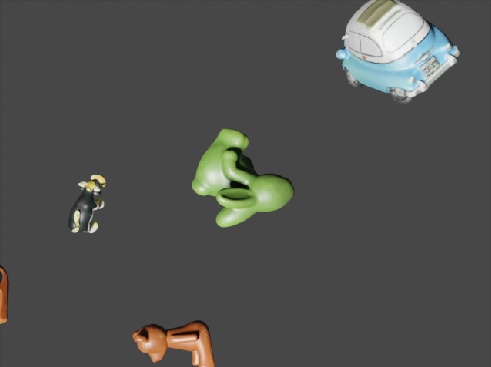
This example shows how to load BOP objects and alternatingly sample light poses, camera poses (looking towards the objects) and object poses (including collision checks).
Usage
First make sure that you have downloaded a BOP dataset in the original folder structure.
In examples/datasets/bop_object_pose_sampling/main.py set the blender_install_path where Blender is or should be installed.
Execute in the BlenderProc main directory:
blenderproc run examples/datasets/bop_object_pose_sampling/main.py <path_to_bop_data> <bop_dataset_name> examples/datasets/bop_object_pose_sampling/output
examples/datasets/bop_object_pose_sampling/main.py: path to the python file with pipeline configuration.<path_to_bop_data>: path to a folder containing BOP datasets.<bop_dataset_name>: name of BOP dataset, e.g. lmexamples/datasets/bop_object_pose_sampling/output: path to the output directory.
Visualization
Visualize the generated data and labels:
blenderproc vis hdf5 examples/datasets/bop_object_pose_sampling/output/0.hdf5
Alternatively, since we generated COCO annotations, you can also visualize the generated coco_annotations.json file:
blenderproc vis coco /path/to/output_dir
Steps
Loads object models and camera intrinsics from specified BOP dataset:
bproc.loader.load_bop_objs(),bproc.loader.load_bop_intrinsics().Creates a point light sampled inside a shell
Loops over five times:
Sample Object Poses inside a cube with collision checks
Sample Camera Poses inside a shell looking at objects
Renders rgb:
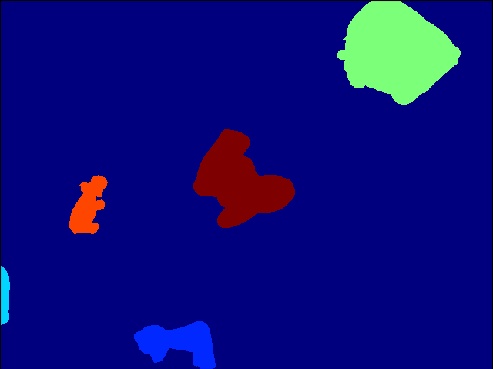
bproc.renderer.Renders instance segmentation masks:
bproc.renderer().Writes pose labels in BOP format to output_dir:
bproc.writer.write_bop().
Python file (main.py)
BopLoader
bproc.loader.load_bop_objs() simply loads all or the specified obj_ids from the BOP dataset given by bop_dataset_path.
bproc.loader.load_bop_intrinsics() sets the intrinsics of the BOP dataset.
bop_objs = bproc.loader.load_bop_objs(bop_dataset_path = os.path.join(args.bop_parent_path, args.bop_dataset_name),
mm2m = True,
obj_ids = [1, 1, 3])
bproc.loader.load_bop_intrinsics(bop_dataset_path = os.path.join(args.bop_parent_path, args.bop_dataset_name))
CameraObjectSampler
# Sample object poses and check collisions
bproc.object.sample_poses(objects_to_sample = bop_objs,
sample_pose_func = sample_pose_func,
max_tries = 1000)
# BVH tree used for camera obstacle checks
bop_bvh_tree = bproc.object.create_bvh_tree_multi_objects(bop_objs)
poses = 0
# Render two camera poses
while poses < 2:
# Sample location
location = bproc.sampler.shell(center = [0, 0, 0],
radius_min = 1,
radius_max = 1.2,
elevation_min = 1,
elevation_max = 89,
uniform_volume = False)
# Determine point of interest in scene as the object closest to the mean of a subset of objects
poi = bproc.object.compute_poi(bop_objs)
# Compute rotation based on vector going from location towards poi
rotation_matrix = bproc.camera.rotation_from_forward_vec(poi - location, inplane_rot=np.random.uniform(-0.7854, 0.7854))
# Add homog cam pose based on location an rotation
cam2world_matrix = bproc.math.build_transformation_mat(location, rotation_matrix)
# Check that obstacles are at least 0.3 meter away from the camera and make sure the view interesting enough
if bproc.camera.perform_obstacle_in_view_check(cam2world_matrix, {"min": 0.3}, bop_bvh_tree):
# Persist camera pose
bproc.camera.add_camera_pose(cam2world_matrix,
frame = poses)
poses += 1
This alternates between sampling new cameras using a bproc.camera and sampling new object poses using a bproc.object.sample_poses().
CocoAnnotationsWriter
bproc.writer.write_coco_annotations(os.path.join(args.output_dir, 'coco_data'),
supercategory = args.bop_dataset_name,
instance_segmaps = seg_data["instance_segmaps"],
instance_attribute_maps = seg_data["instance_attribute_maps"],
colors = data["colors"],
color_file_format = "JPEG",
append_to_existing_output = True)
Writes CocoAnnotations of all objects from the given BOP dataset ("supercategory").
BopWriter
bproc.writer.write_bop(os.path.join(args.output_dir, 'bop_data'),
dataset = args.bop_dataset_name,
depths = data["depth"],
depth_scale = 1.0,
colors = data["colors"],
color_file_format = "JPEG",
append_to_existing_output = True)
Writes object to camera poses and intrinsics of the given "dataset": "args.bop_dataset_name" in BOP format. If output folder exists outputs are appended with "append_to_existing_output": True.
“depth_scale”: 1.0: Multiply the uint16 output depth image with this factor to get depth in mm. Used to trade-off between depth accuracy and maximum depth value. Default value “depth_scale”: 1.0 corresponds to 65.54m maximum depth and 1mm accuracy.
More examples
bop_scene_replication: Replicate the scenes and cameras from BOP datasets in simulation.
bop_object_physics_positioning: Drop BOP objects on planes and randomize materials
bop_object_on_surface_sampling: Sample upright poses on plane and randomize materials