Basic scene
In this example we demonstrate the basic functionality of BlenderProc.
Usage
Execute in the BlenderProc main directory, if this is the first time BlenderProc is executed. It will automatically download blender, see the CLI arguments if you want to change the installation path:
blenderproc run examples/basics/basic/main.py examples/resources/camera_positions examples/resources/scene.obj examples/basics/basic/output
examples/basics/basic/main.py: path to the python file with pipeline configuration.
The three arguments afterwards are used by the argparser at the top of the main.py file:
examples/resources/camera_positions: text file with parameters of camera positions.examples/resources/scene.obj: path to the object file with the basic scene.examples/basics/basic/output: path to the output directory.
Visualization
Visualize the generated data:
blenderproc vis hdf5 examples/basics/basic/output/0.hdf5
Steps
Loads
scene.obj:loader.ObjectLoadermodule.Creates a point light :
lighting.LightLoadermodule.Loads camera positions from
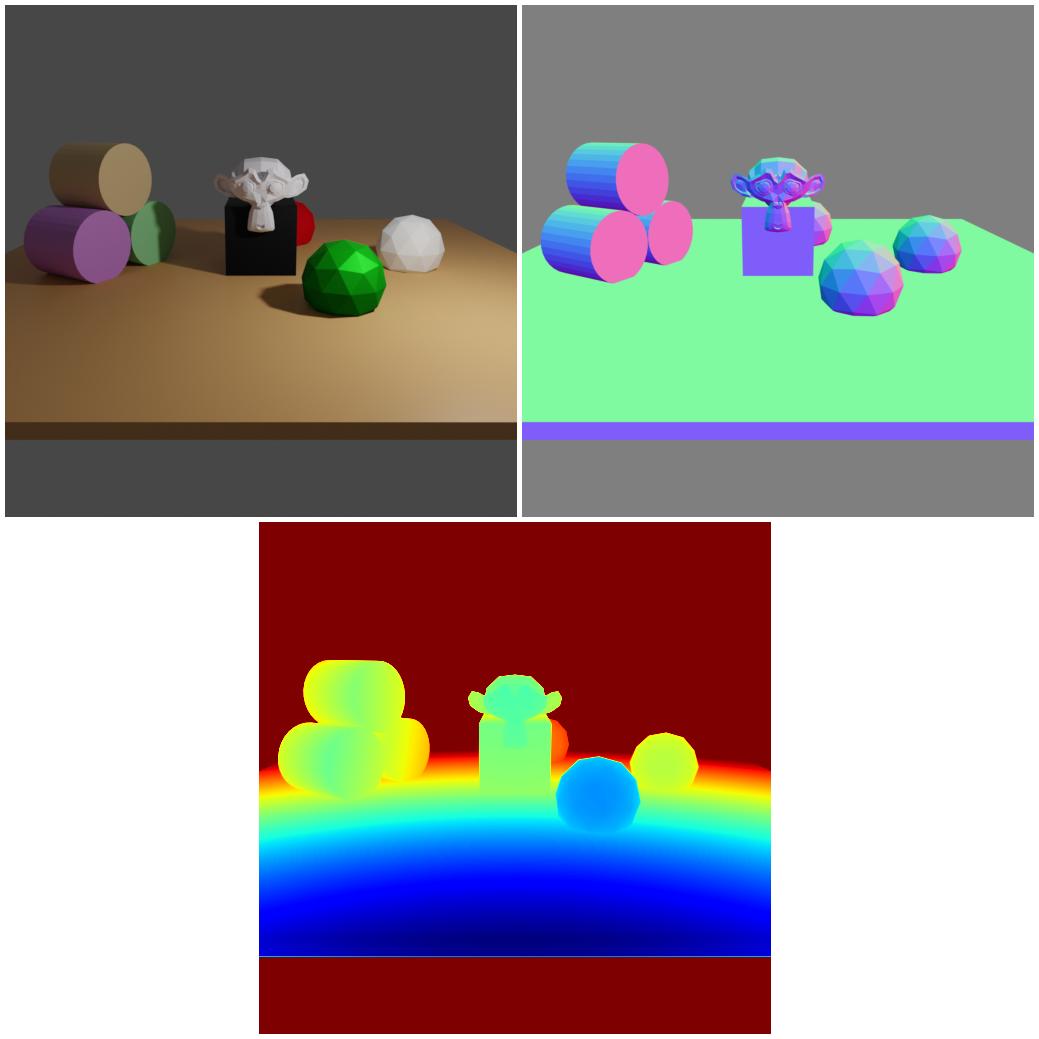
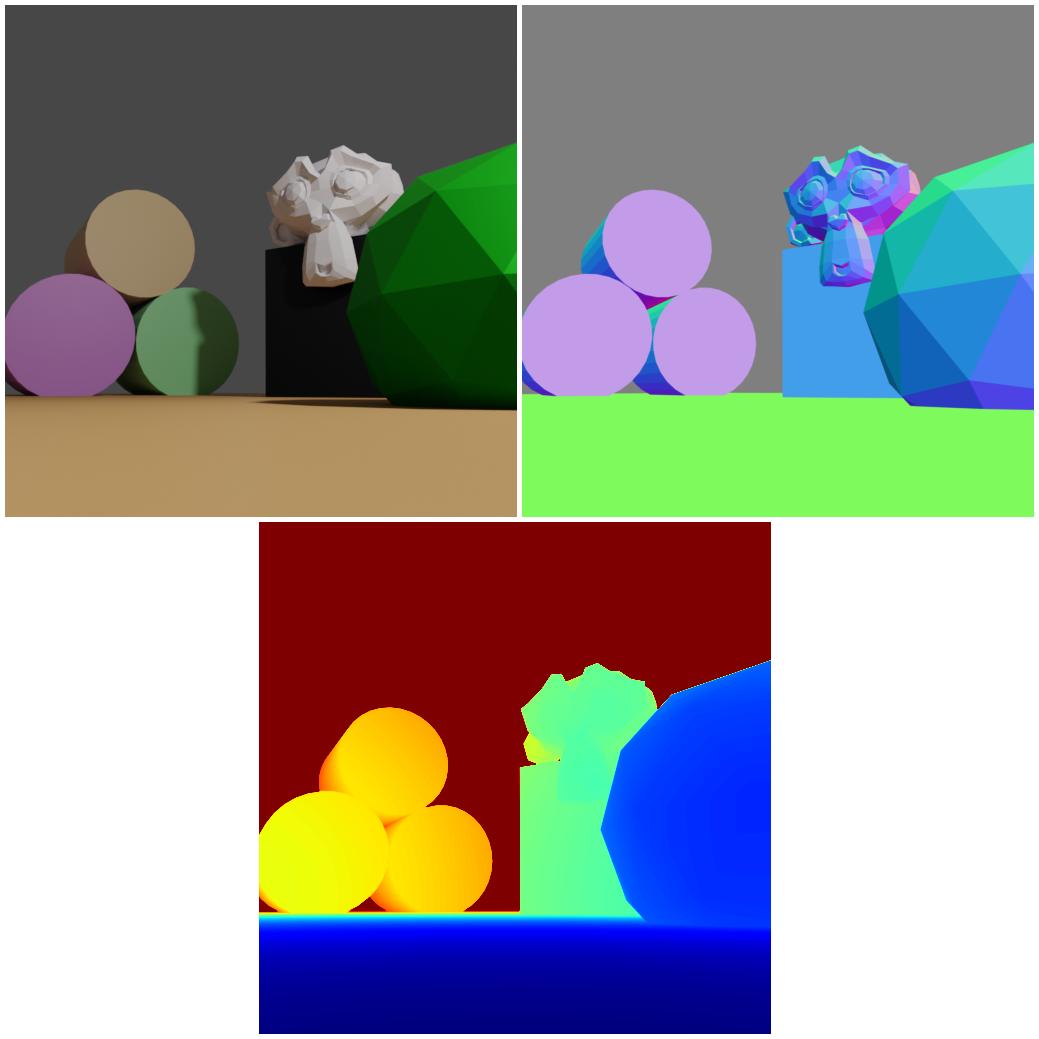
camera_positions:camera.CameraLoadermodule.Renders rgb, normals and depth:
renderer.RgbRenderermodule.Writes the output to .hdf5 containers:
writer.Hdf5Writermodule.
Setup
import blenderproc as bproc
This sets up the blenderproc environment. blenderproc has to be the first import. This import already installs blender and all necessary pip packages.
bproc.init()
This init does some basic initialization of the blender project (e.q. sets background color, configures computing device, creates a camera).
Object loading
# load the objects into the scene
objs = bproc.loader.load_obj(args.scene)
This call imports an .obj file into the scene.
The path of the
.objis given via theargs.scenevalue.Here we are using the second argument given to the
blenderprocrun, in the upper command. The output path is set toexamples/resources/scene.obj.
Light loading
# define a light and set its location and energy level
light = bproc.types.Light()
light.set_type("POINT")
light.set_location([5, -5, 5])
light.set_energy(1000)
Here a point light is created. The location and energy are set via the set_location and set_energy fcts.
Camera loading
# define the camera resolution
bproc.camera.set_resolution(512, 512)
# read the camera positions file and convert into homogeneous camera-world transformation
with open(args.camera, "r") as f:
for line in f.readlines():
line = [float(x) for x in line.split()]
position, euler_rotation = line[:3], line[3:6]
matrix_world = bproc.math.build_transformation_mat(position, euler_rotation)
bproc.camera.add_camera_pose(matrix_world)
First the camera resolution is set to 512 by 512.
After that the camera pose file is parsed and a matrix to world is calculated based on the extracted position and rotation.
This is then set via the bproc.camera.add_camera_pose(matrix_world) fct call.
Be aware that each of these calls uses the created camera in the init step and adds a new key frame saving its pose.
The file format here is:
location_x location_y location_z rotation_euler_x rotation_euler_y rotation_euler_z
=> Creates the files campose_0000.npy and campose_0001.npy
Rgb rendering
# activate normal and depth rendering
bproc.renderer.enable_depth_output(activate_antialiasing=False)
bproc.renderer.enable_normals_output()
bproc.renderer.set_noise_threshold(0.01) # this is the default value
# render the whole pipeline
data = bproc.renderer.render()
First we enable that blenderproc also generates the normals and the distance for each color image.
Furthermore, we set the desired noise threshold in our image.
A lower noise threshold will reduce the noise in the image, but increase the rendering time.
The default value is 0.01, this should work for most applications.
=> Creates the files rgb_0000.png and rgb_0001.png in the temp folder.
It also creates the normals and depth
The normal and depth images are rendered using the
.exrformat which allows linear colorspace and higher precisionHere, the depth image is not antialiased, meaning that for each pixel the depth in this pixel is not aggregated over its surface. While distance and depth images sound similar, they are not the same: In distance images, each pixel contains the actual distance from the camera position to the corresponding point in the scene. In depth images, each pixel contains the distance between the camera and the plane parallel to the camera which the corresponding point lies on.
=> Creates the files normal_0000.exr and normal_0001.exr and the files distance_0000.exr and distance_0001.exr.
In this example all of these are temporary and are read in directly after rendering and deleted in the temp folder.
These are then packed into a dictionary and returned and saved in the data variable.
FAQ: Why are they stored on disc if we read them directly in again?
Blender offers no other option than to first save them to disc and afterwards reading them in again.
Hdf5 Writing
# write the data to a .hdf5 container
bproc.writer.write_hdf5(args.output_dir, data)
The last module now merges all images created by the rendering call into one
.hdf5file per cam pose.A
.hdf5file can be seen as a dict of numpy arrays.
The file 0.h5py would therefore look like the following:
{
"colors": #<numpy array with pixel values read in from rgb_0000.png>,
"depth": #<numpy array with pixel values read in from depth_0000.exr>,
"normals": #<numpy array with pixel values read in from normals_0000.exr>,
}
=> Creates the files 0.h5py and 1.h5py
More Modules
Well done, how about another example on camera_sampling or are you more interested in object manipulation?