Camera sampling
In this example we are demonstrating the sampling features in relation to camera objects.
Usage
Execute in the BlenderProc main directory:
blenderproc run examples/basics/camera_sampling/main.py examples/resources/scene.obj examples/basics/camera_sampling/output
examples/basics/camera_sampling/main.py: path to the python file.examples/resources/scene.obj: path to the object file with the basic scene.examples/basics/camera_sampling/output: path to the output directory.
Visualization
Visualize the generated data:
blenderproc vis hdf5 examples/basics/camera_sampling/output/0.hdf5
Steps
Camera sampling
# Find point of interest, all cam poses should look towards it
poi = bproc.object.compute_poi(objs)
# Sample five camera poses
for i in range(5):
# Sample random camera location above objects
location = np.random.uniform([-10, -10, 8], [10, 10, 12])
# Compute rotation based on vector going from location towards poi
rotation_matrix = bproc.camera.rotation_from_forward_vec(poi - location, inplane_rot=np.random.uniform(-0.7854, 0.7854))
# Add homog cam pose based on location an rotation
cam2world_matrix = bproc.math.build_transformation_mat(location, rotation_matrix)
bproc.camera.add_camera_pose(cam2world_matrix)
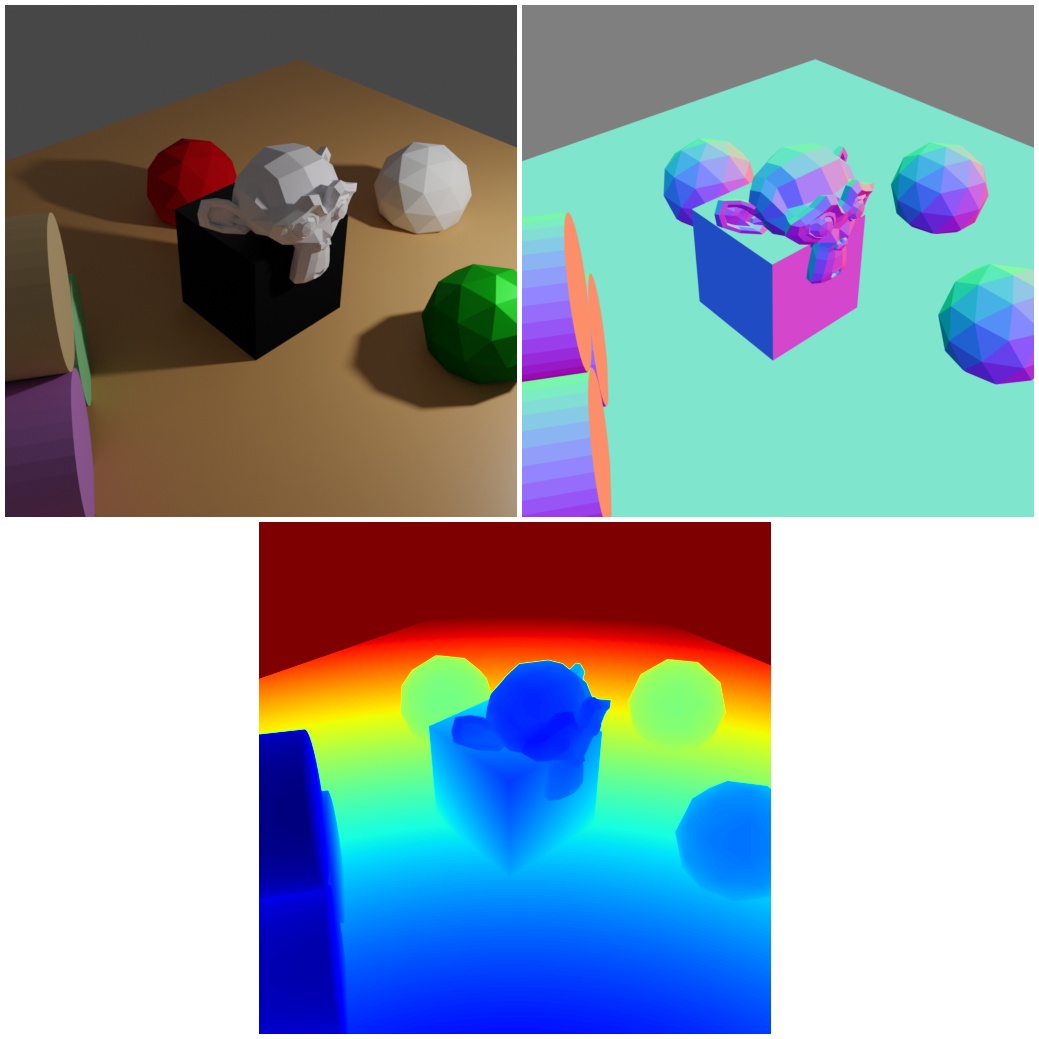
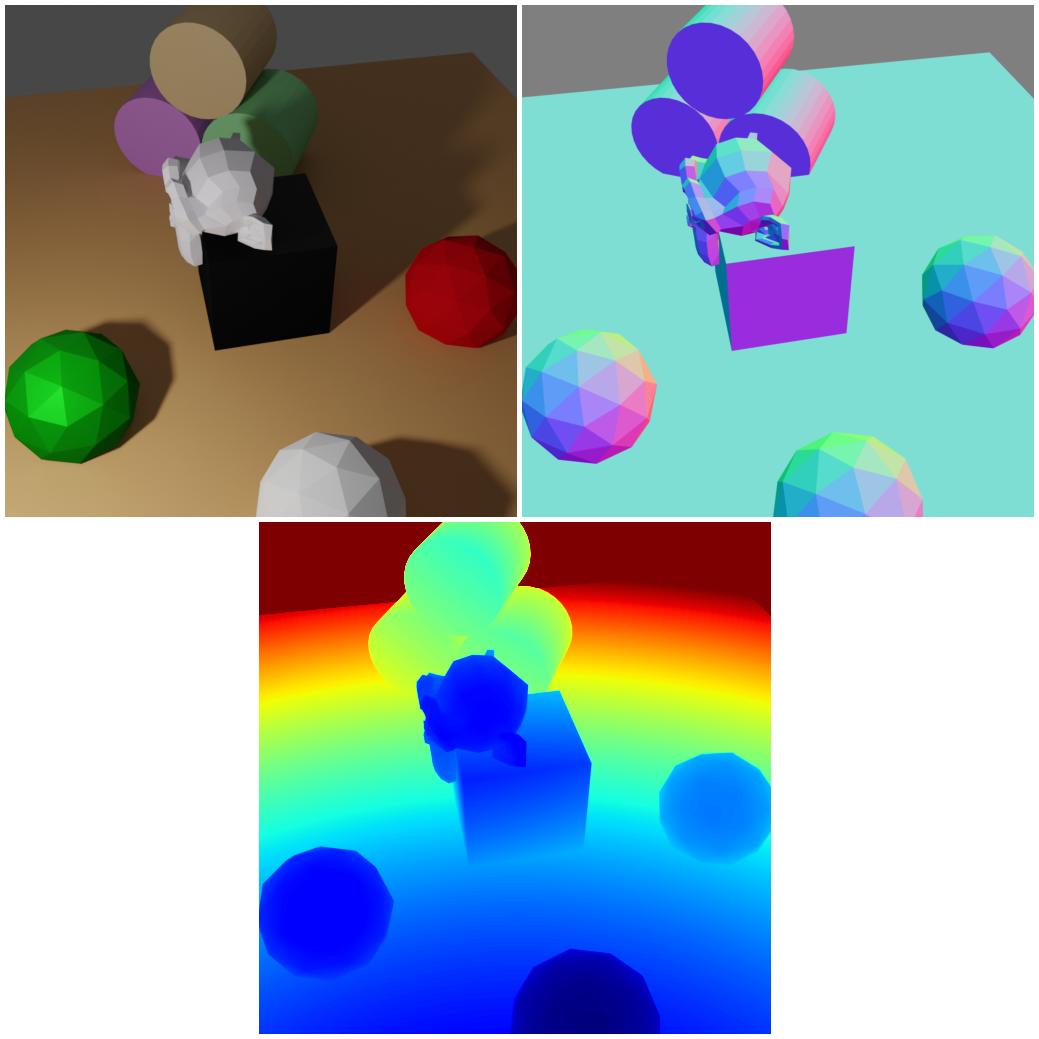
In this example, all camera poses are constrained to “look at” a point of interest (POI).
Sample location uniformly in a bounding box above the plane.
Set orientation of the camera such that it will always look at the POI at any given location. By using the
bproc.camera.rotation_from_forward_vecfct.Optionally, add an
"inplane_rot"value to rotate the camera around the optical axis. All values are in radians not in degree.