BOP object on textured surface sampling
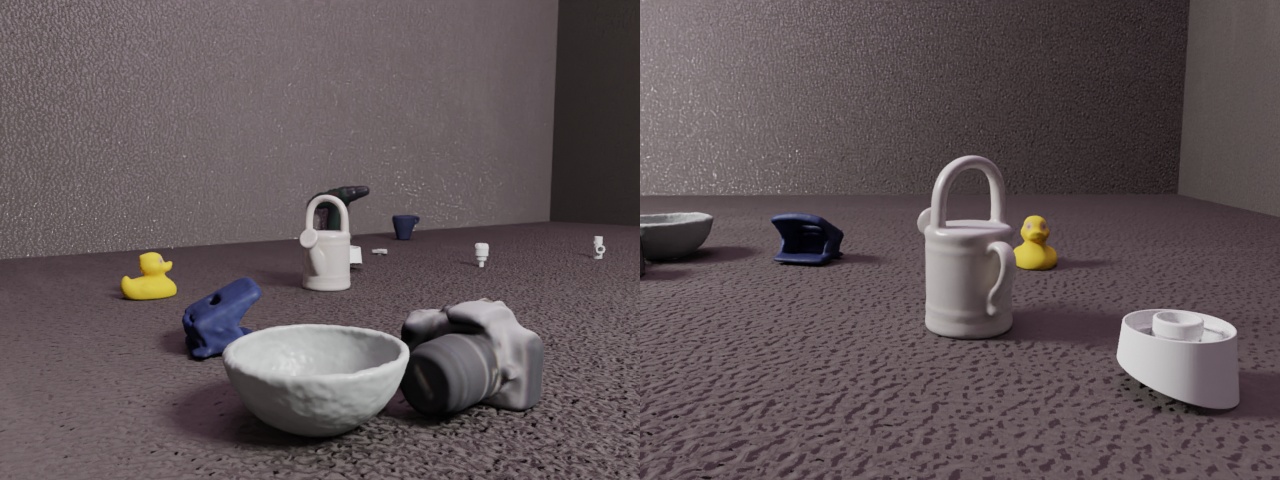
Here we explain the on surface sampling config used for the synthetic data generation in the BOP Challenge 2020. BOP objects from specified datasets are randomly chosen and placed upright onto a plane inside a cube with randomized PBR textures. Object material properties and light sources are also randomized. Samples cameras looking at objects. Outputs RGB, depth, camera intrinsics and object poses in BOP format.
Usage
Make sure that you downloaded the BOP datasets.
Execute in the BlenderProc main directory:
blenderproc download cc_textures
blenderproc run examples/datasets/bop_object_on_surface_sampling/main.py
<path_to_bop_data>
<bop_dataset_name>
resources/cctextures
examples/datasets/bop_object_on_surface_sampling/output
examples/datasets/bop_object_on_surface_sampling/main.py: path to the python file with pipeline configuration.<path_to_bop_data>: path to a folder containing BOP datasets.<bop_dataset_name>: name of BOP dataset for which ground truth should be saved, e.g. lmresources/cctextures: path to CCTextures folderexamples/datasets/bop_object_on_surface_sampling/output: path to an output folder.
Generate a dataset
To aggregate data and labels over multiple scenes, simply run the script multiple times using the same command. As data is saved in chunks of 1000 images, you can easily distribute the data generation by running the scripts on different machines/servers and then collecting all chunks.
Steps
Load T-LESS BOP models:
bproc.loader.load_bop_objs().Load LM BOP models:
bproc.loader.load_bop_objs.Load
<args:1>(YCB-V) BOP models:bproc.loader.load_bop_objs.Sample colors for T-LESS models:
mat.set_principled_shader_value().Sample roughness and specular values for all objects:
mat.set_principled_shader_value().Construct planes:
bproc.object.create_primiative().Switch to a light emission shader for the top plane.
Load CCTexture materials:
bproc.loader.load_ccmaterials().Sample a material for the other planes:
plane.replace_materials().Sample upright objects poses on surface.
Sample point light source.
Sample camera poses
bproc.add_camera_pose().Render RGB and depth:
bproc.renderer.Write BOP data:
bproc.writer.write_bop.
Python file (main.py)
BOP Loader
# load distractor bop objects
distractor_bop_objs = bproc.loader.load_bop_objs(bop_dataset_path = os.path.join(args.bop_parent_path, 'tless'),
model_type = 'cad',
mm2m = True,
sample_objects = True,
num_of_objs_to_sample = 3)
distractor_bop_objs += bproc.loader.load_bop_objs(bop_dataset_path = os.path.join(args.bop_parent_path, 'lm'),
mm2m = True,
sample_objects = True,
num_of_objs_to_sample = 3)
# load a random sample of bop objects into the scene
sampled_bop_objs = bproc.loader.load_bop_objs(bop_dataset_path = os.path.join(args.bop_parent_path, args.bop_dataset_name),
mm2m = True,
sample_objects = True,
num_of_objs_to_sample = 10)
bproc.loader.load_bop_intrinsics(bop_dataset_path = os.path.join(args.bop_parent_path, args.bop_dataset_name))
Here we are sampling BOP objects from 3 different datasets.
We load 3 random objects from LM and T-LESS datasets, and 10 objects from the dataset given by
args.bop_dataset_name(e.g. ycbv in this case).In this example,
args.bop_dataset_name(ycbv) dataset intrinsics are used when rendering bybproc.loader.load_bop_intrinsics()
Material Manipulator
# set shading and physics properties and randomize PBR materials
for j, obj in enumerate(sampled_bop_objs + distractor_bop_objs):
obj.set_shading_mode('auto')
mat = obj.get_materials()[0]
if obj.get_cp("bop_dataset_name") in ['itodd', 'tless']:
grey_col = np.random.uniform(0.3, 0.9)
mat.set_principled_shader_value("Base Color", [grey_col, grey_col, grey_col, 1])
mat.set_principled_shader_value("Roughness", np.random.uniform(0, 1.0))
mat.set_principled_shader_value("Specular", np.random.uniform(0, 1.0))
Sample grey colors for T-LESS object’s materials using
np.random.uniform(0.3, 0.9)function.Sample
specularandroughnessvalues for object’s materials from all datasets usingnp.random.uniform(0, 1.0)function."obj.set_shading_mode('auto')"sets the shading for these corresponding objects to auto smoothing. This looks more realistic for meshes that have both sharp edges and curved surfaces like in YCB-V.
Basic Mesh Initializer
# create room
room_planes = [bproc.object.create_primitive('PLANE', scale=[2, 2, 1]),
bproc.object.create_primitive('PLANE', scale=[2, 2, 1], location=[0, -2, 2], rotation=[-1.570796, 0, 0]),
bproc.object.create_primitive('PLANE', scale=[2, 2, 1], location=[0, 2, 2], rotation=[1.570796, 0, 0]),
bproc.object.create_primitive('PLANE', scale=[2, 2, 1], location=[2, 0, 2], rotation=[0, -1.570796, 0]),
bproc.object.create_primitive('PLANE', scale=[2, 2, 1], location=[-2, 0, 2], rotation=[0, 1.570796, 0])]
Construct minimal 2m x 2m x 2m room from 5 planes
Material Manipulator
# sample light color and strenght from ceiling
light_plane = bproc.object.create_primitive('PLANE', scale=[3, 3, 1], location=[0, 0, 10])
light_plane.set_name('light_plane')
light_plane_material = bproc.material.create('light_material')
light_plane_material.make_emissive(emission_strength=np.random.uniform(3,6),
emission_color=np.random.uniform([0.5, 0.5, 0.5, 1.0], [1.0, 1.0, 1.0, 1.0]))
light_plane.replace_materials(light_plane_material)
# sample point light on shell
light_point = bproc.types.Light()
light_point.set_energy(200)
light_point.set_color(np.random.uniform([0.5, 0.5, 0.5], [1, 1, 1]))
location = bproc.sampler.shell(center = [0, 0, 0], radius_min = 1, radius_max = 1.5,
elevation_min = 5, elevation_max = 89, uniform_volume = False)
For a default material of a light plane which was created during object’s initialization, switch to a Emission shader and sample
colorandstrengthvalues of the emitted light.
CCMaterial Loader
cc_textures = bproc.loader.load_ccmaterials(args.cc_textures_path)
random_cc_texture = np.random.choice(cc_textures)
Load a random CC0Texture that was downloaded from https://cc0textures.com/
Entity Manipulator
def sample_initial_pose(obj: bproc.types.MeshObject):
obj.set_location(bproc.sampler.upper_region(objects_to_sample_on=room_planes[0:1],
min_height=1, max_height=4, face_sample_range=[0.4, 0.6]))
obj.set_rotation_euler(np.random.uniform([0, 0, 0], [0, 0, np.pi * 2]))
Sample a CCTextures material once for all loaded ground_planes.
On Surface Sampler
placed_objects = bproc.object.sample_poses_on_surface(objects_to_sample=sampled_bop_objs + distractor_bop_objs,
surface=room_planes[0],
sample_pose_func=sample_initial_pose,
min_distance=0.01,
max_distance=0.2)
Get all objects and the ground plane
"surface": "room_plane[0]".Use the provider
"sample_pose_func": sample_initial_pose"to sample objects above the plane at specified height ("min_distance", "max_distance"), relative position on plane and rotation. Here, the x and y min and max rotation values are set to 0, meaning that the sampled object will stand upright at random z axis rotation."bproc.object.sample_poses_on_surface"then places the objects down to the plane. Check the on_surface_object_sampling example for more details.
Light Sampler
light_point = bproc.types.Light()
light_point.set_energy(200)
light_point.set_color(np.random.uniform([0.5, 0.5, 0.5], [1, 1, 1]))
location = bproc.sampler.shell(center = [0, 0, 0], radius_min = 1, radius_max = 1.5,
elevation_min = 5, elevation_max = 89, uniform_volume = False)
light_point.set_location(location)
Samples an additional point light source (next to ceiling) by the
"bproc.sampler.shell"function around the origin.
Camera Sampler
poses = 0
while poses < 10:
# Sample location
location = bproc.sampler.shell(center = [0, 0, 0],
radius_min = 0.61,
radius_max = 1.24,
elevation_min = 5,
elevation_max = 89,
uniform_volume = False)
# Determine point of interest in scene as the object closest to the mean of a subset of objects
poi = bproc.object.compute_poi(np.random.choice(placed_objects, size=10))
# Compute rotation based on vector going from location towards poi
rotation_matrix = bproc.camera.rotation_from_forward_vec(poi - location, inplane_rot=np.random.uniform(-0.7854, 0.7854))
# Add homog cam pose based on location an rotation
cam2world_matrix = bproc.math.build_transformation_mat(location, rotation_matrix)
# Check that obstacles are at least 0.3 meter away from the camera and make sure the view interesting enough
if bproc.camera.perform_obstacle_in_view_check(cam2world_matrix, {"min": 0.3}, bop_bvh_tree):
# Persist camera pose
bproc.camera.add_camera_pose(cam2world_matrix)
poses += 1
Samples
"poses": 10camera poses, where the camera location is sampled using abproc.sampler.shellProvider with"uniform_elevation"sampling.The camera rotation is defined by a point of interest (
"poi") plus a sampled"inplane_rot"in the specified range.The
"poi"is defined by the object closest to the mean position of all objects that are returned by the"brpoc.object.compute_poi"function, i.e."size": 10objects from the target BOP dataset.Camera poses undergo
"obstacle_in_view_checks"with respect to all objects besides ground_plane ("excluded_objs_in_proximity_check") to ensure that no objects are closer than"min": 0.3meters.
Rgb Renderer
bproc.renderer.enable_depth_output(activate_antialiasing=False)
Renders an RGB image and also outputs a depth images.
Bop Writer
bproc.writer.write_bop(os.path.join(args.output_dir, 'bop_data'),
dataset = args.bop_dataset_name,
depths = data["depth"],
colors = data["colors"],
color_file_format = "JPEG",
ignore_dist_thres = 10)
Saves all pose and camera information that is provided in BOP datasets.
Only considers objects from the given
dataset = args.bop_dataset_nameSaves the images as jpg
More examples
bop_object_pose_sampling: Sample BOP object and camera poses.
bop_object_physics_positioning: Drop BOP objects on planes and randomize materials
bop_scene_replication: Replicate the scenes and cameras from BOP datasets in simulation.