Develop your robotic tasks using
an intuitive graphical user interface
Licensed under the EPL v1.0
Latest Release v2.5.0
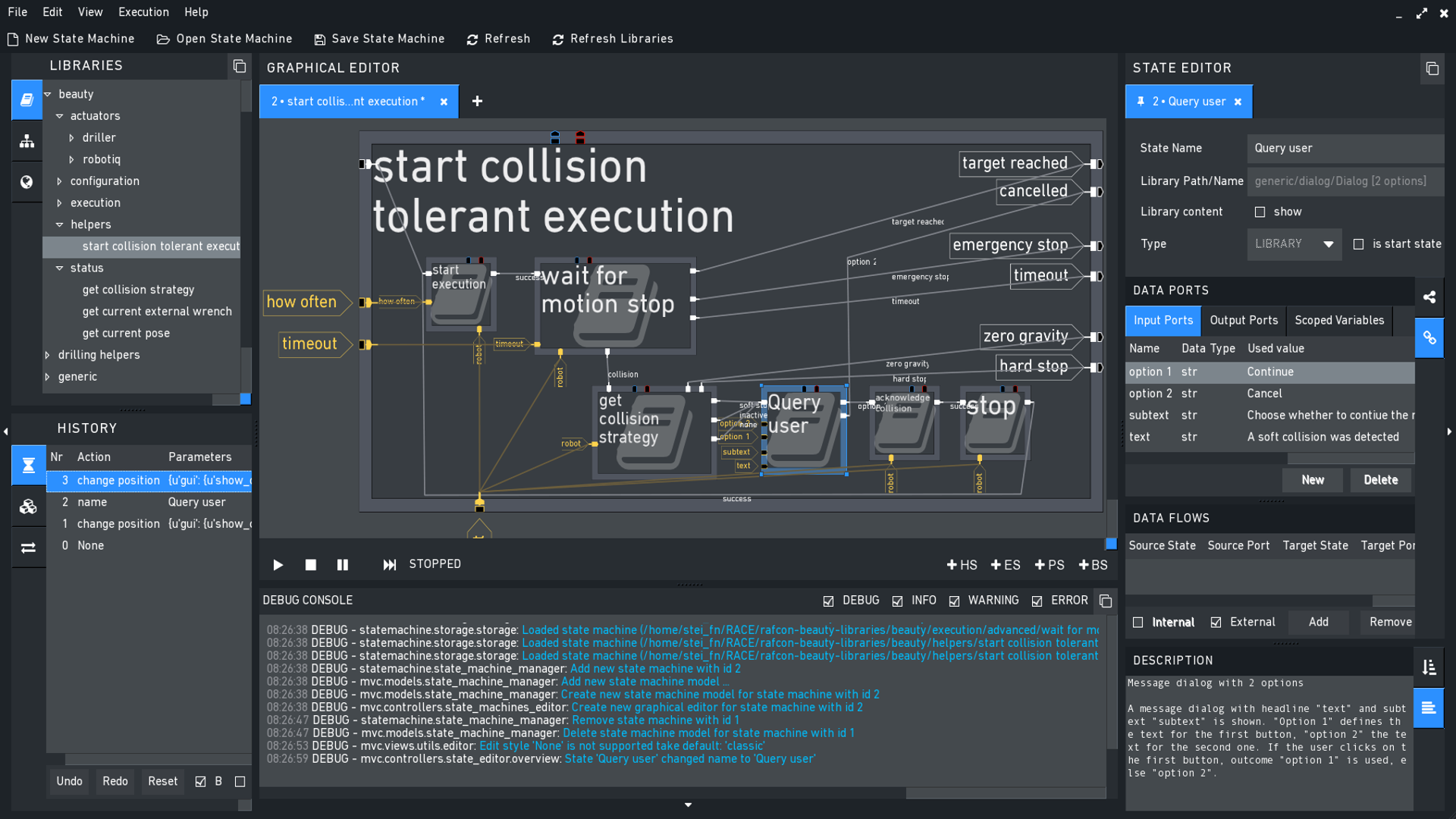
The RAFCON GUI showing a simple state machine
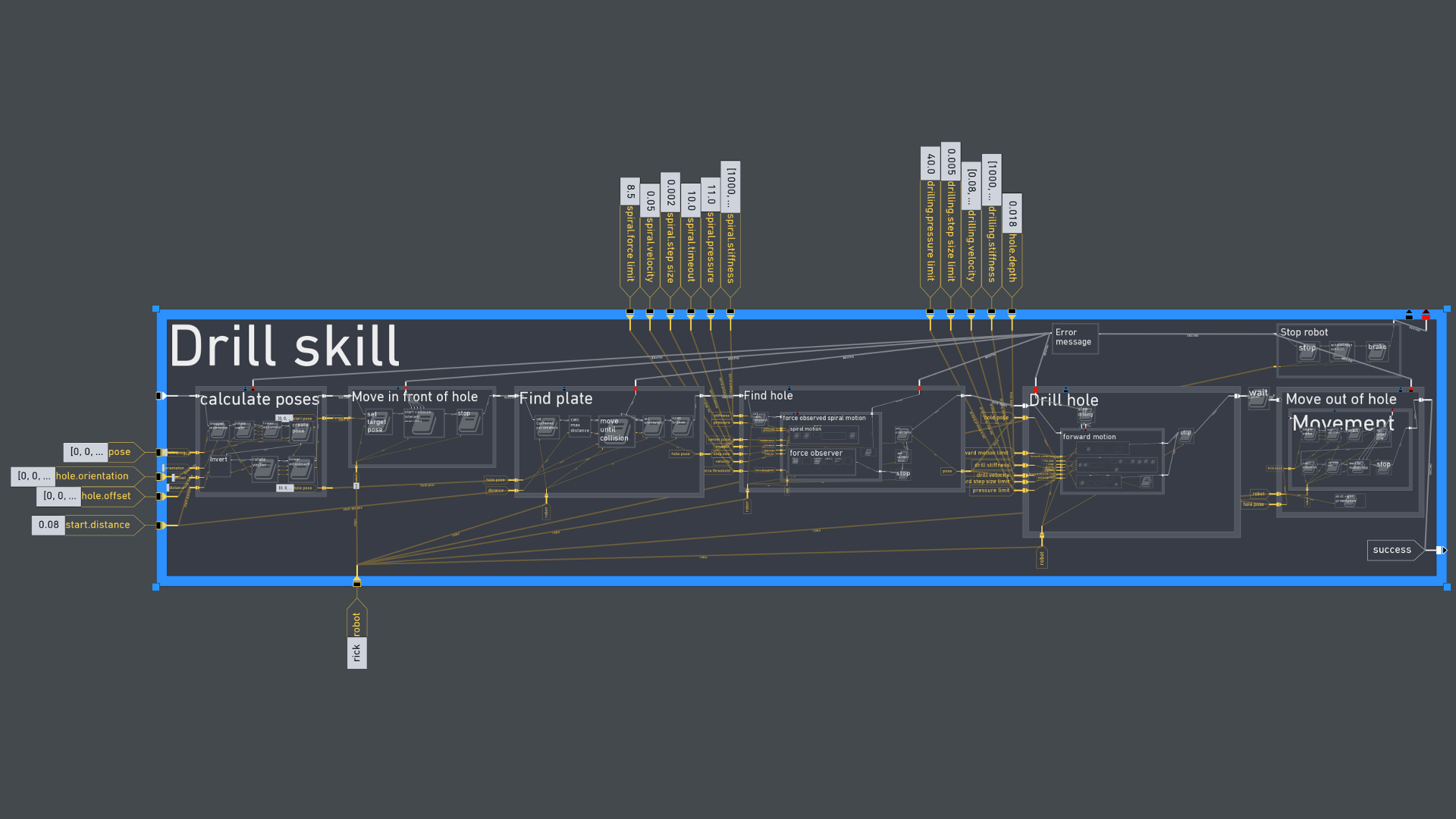
The RAFCON GUI showing a more complex state machine: A skill for drilling
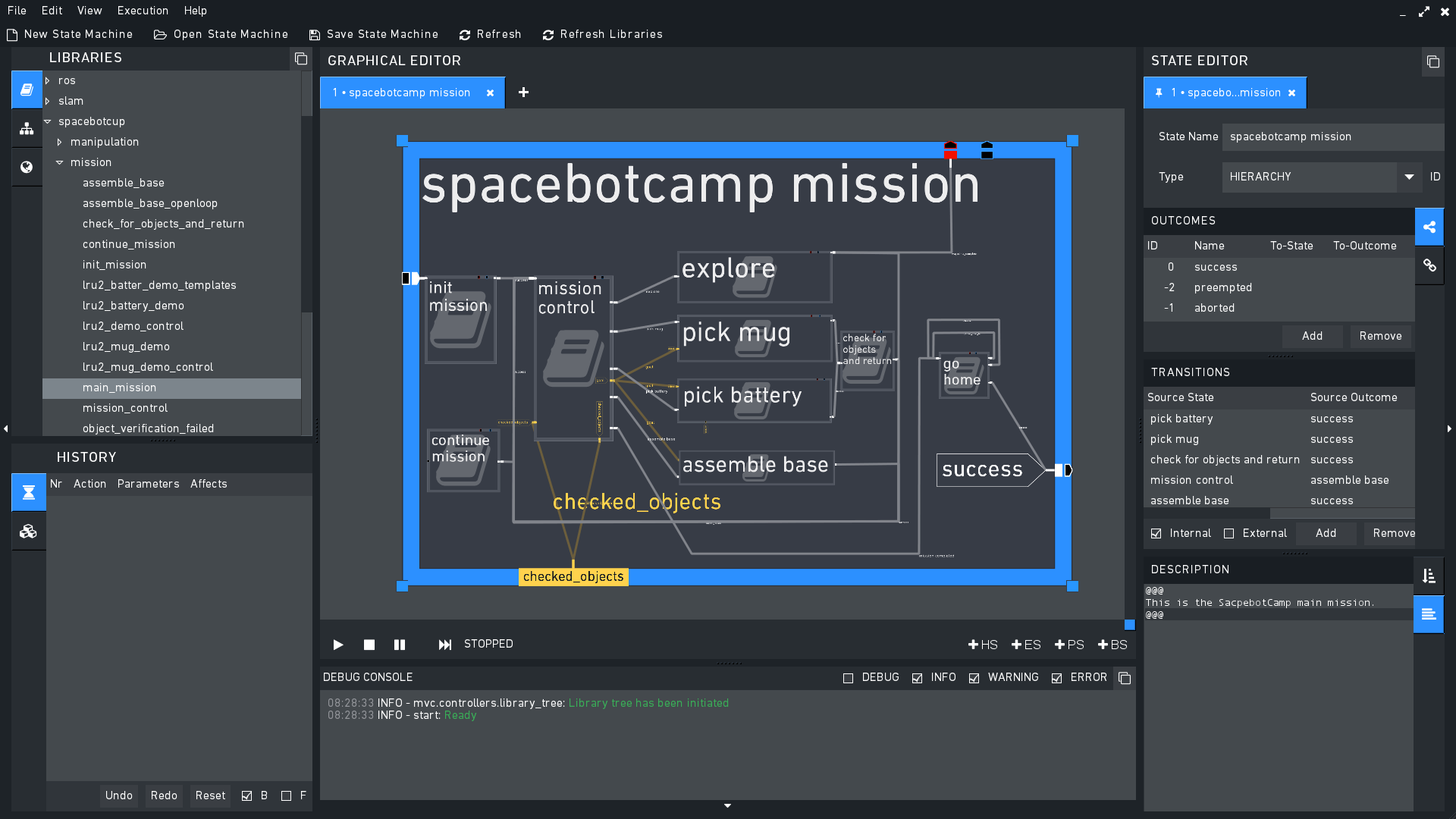
The RAFCON GUI showing the first layer of the state machine we used for the SpacebotCamp (see News/Projects)
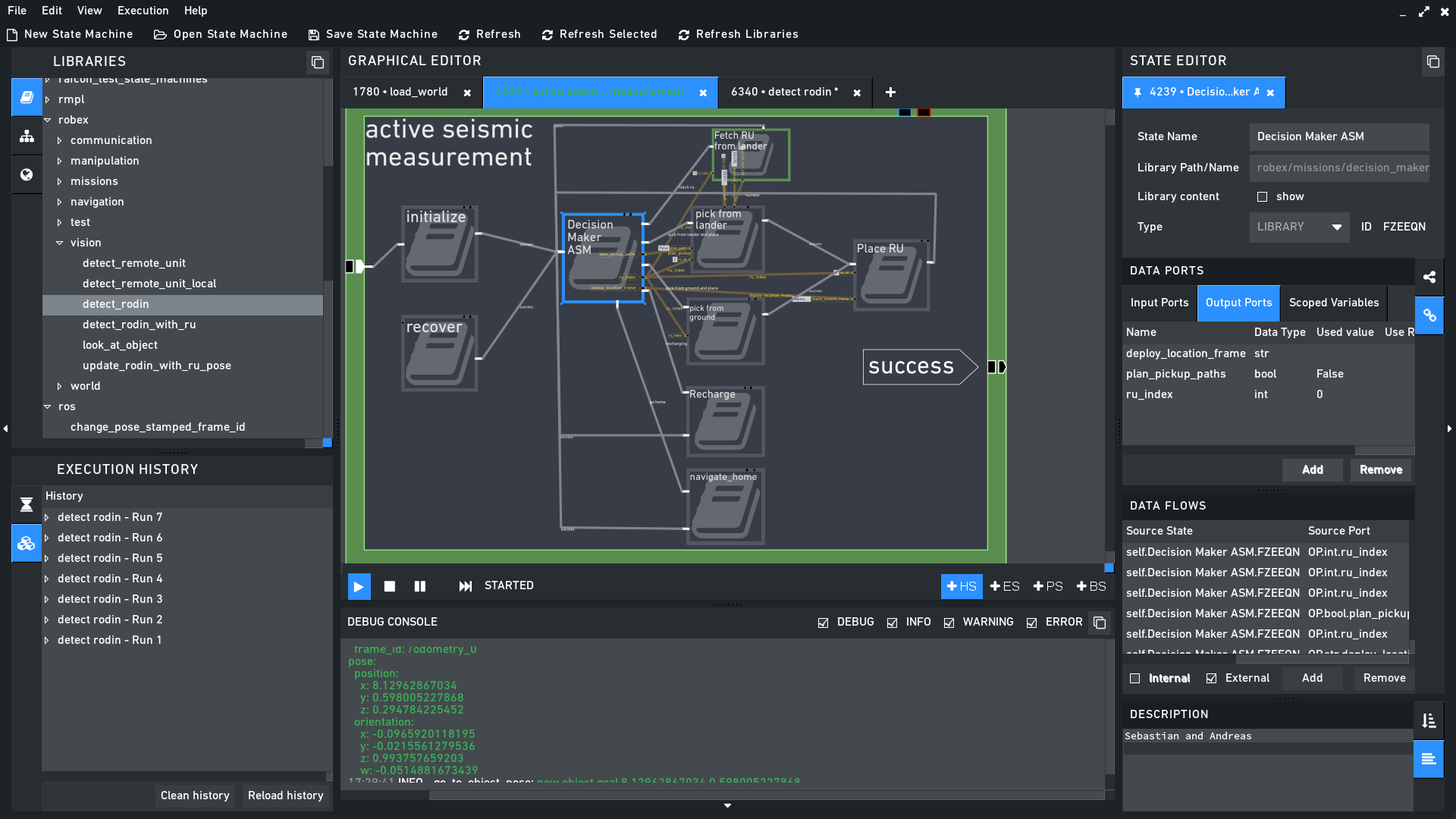
A screenshot of the RAFCON GUI taken on Mt. Etna during a mission run of the Robex project (see News/Projects)